નાડિરેક્ટરી
૧. મુખ્ય ખ્યાલો અને મેટ્રિક્સ
2. માપન તકનીકો
૩. ડેટા પ્રોસેસિંગ અને ભૂલો
૪. પ્રક્રિયાની અસરો
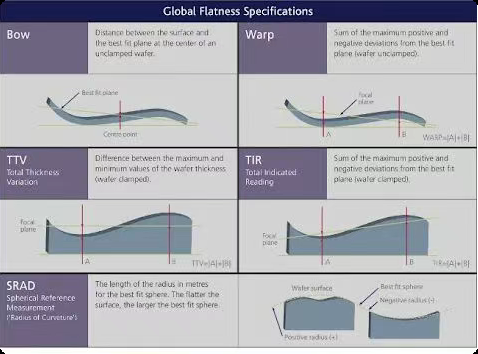
સેમિકન્ડક્ટર ઉત્પાદનમાં, વેફર્સની જાડાઈ એકરૂપતા અને સપાટી સપાટતા પ્રક્રિયા ઉપજને અસર કરતા મહત્વપૂર્ણ પરિબળો છે. ટોટલ થિકનેસ વેરિએશન (TTV), બો (આર્ક્યુએટ વોરપેજ), વાર્પ (ગ્લોબલ વોરપેજ), અને માઇક્રોવાર્પ (નેનો-ટોપોગ્રાફી) જેવા મુખ્ય પરિમાણો ફોટોલિથોગ્રાફી ફોકસ, કેમિકલ મિકેનિકલ પોલિશિંગ (CMP), અને થિન-ફિલ્મ ડિપોઝિશન જેવી મુખ્ય પ્રક્રિયાઓની ચોકસાઇ અને સ્થિરતા પર સીધી અસર કરે છે.
મુખ્ય ખ્યાલો અને મેટ્રિક્સ
ટીટીવી (કુલ જાડાઈમાં ફેરફાર)
વાર્પ
વાર્પ રેફરન્સ પ્લેનની તુલનામાં તમામ સપાટી બિંદુઓમાં મહત્તમ પીક-ટુ-વેલી તફાવતનું પ્રમાણ નક્કી કરે છે, મુક્ત સ્થિતિમાં વેફરની એકંદર સપાટતાનું મૂલ્યાંકન કરે છે.
માપન તકનીકો
૧. ટીટીવી માપન પદ્ધતિઓ
- ડ્યુઅલ-સરફેસ પ્રોફાઇલમેટ્રી
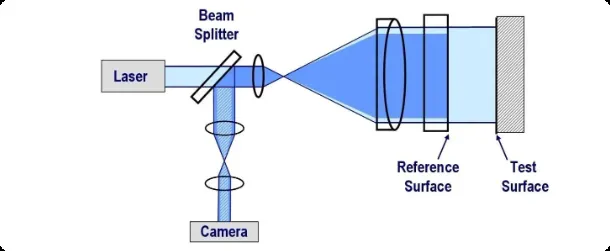
- ફિઝેઉ ઇન્ટરફેરોમેટ્રી:સંદર્ભ સમતલ અને વેફર સપાટી વચ્ચે દખલગીરી ફ્રિન્જનો ઉપયોગ કરે છે. સરળ સપાટીઓ માટે યોગ્ય પરંતુ મોટા-વક્ર વેફર દ્વારા મર્યાદિત.
- વ્હાઇટ લાઇટ સ્કેનિંગ ઇન્ટરફેરોમેટ્રી (SWLI):ઓછા સુસંગત પ્રકાશ પરબિડીયાઓ દ્વારા સંપૂર્ણ ઊંચાઈ માપે છે. પગથિયાં જેવી સપાટીઓ માટે અસરકારક પરંતુ યાંત્રિક સ્કેનિંગ ગતિ દ્વારા મર્યાદિત.
- કોન્ફોકલ પદ્ધતિઓ:પિનહોલ અથવા ડિસ્પરશન સિદ્ધાંતો દ્વારા સબ-માઇક્રોન રિઝોલ્યુશન પ્રાપ્ત કરો. ખરબચડી અથવા અર્ધપારદર્શક સપાટીઓ માટે આદર્શ છે પરંતુ પોઈન્ટ-બાય-પોઈન્ટ સ્કેનિંગને કારણે ધીમું છે.
- લેસર ત્રિકોણીકરણ:ઝડપી પ્રતિભાવ પરંતુ સપાટીના પ્રતિબિંબમાં ફેરફારને કારણે ચોકસાઈ ગુમાવવાની સંભાવના.
- ટ્રાન્સમિશન/પ્રતિબિંબ જોડાણ
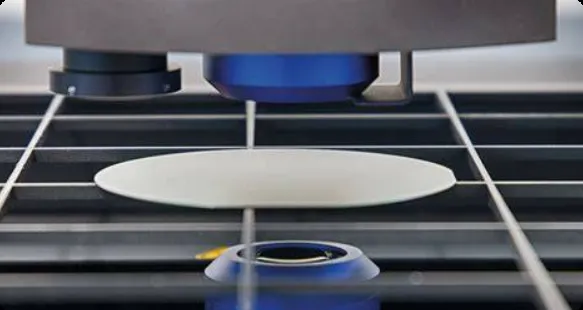
- ડ્યુઅલ-હેડ કેપેસિટન્સ સેન્સર્સ: બંને બાજુ સેન્સરનું સપ્રમાણ સ્થાન T = L – d₁ – d₂ (L = બેઝલાઇન અંતર) તરીકે જાડાઈ માપે છે. ઝડપી પરંતુ ભૌતિક ગુણધર્મો પ્રત્યે સંવેદનશીલ.
- એલિપ્સોમેટ્રી/સ્પેક્ટ્રોસ્કોપિક રિફ્લેક્ટોમેટ્રી: પાતળા-ફિલ્મ જાડાઈ માટે પ્રકાશ-દ્રવ્યની ક્રિયાપ્રતિક્રિયાઓનું વિશ્લેષણ કરે છે પરંતુ બલ્ક ટીટીવી માટે અયોગ્ય છે.
2. ધનુષ અને વાર્પ માપન
- મલ્ટી-પ્રોબ કેપેસિટન્સ એરે: ઝડપી 3D પુનર્નિર્માણ માટે એર-બેરિંગ સ્ટેજ પર પૂર્ણ-ક્ષેત્ર ઊંચાઈ ડેટા કેપ્ચર કરો.
- સ્ટ્રક્ચર્ડ લાઇટ પ્રોજેક્શન: ઓપ્ટિકલ શેપિંગનો ઉપયોગ કરીને હાઇ-સ્પીડ 3D પ્રોફાઇલિંગ.
- લો-એનએ ઇન્ટરફેરોમેટ્રી: ઉચ્ચ-રીઝોલ્યુશન સપાટી મેપિંગ પરંતુ કંપન-સંવેદનશીલ.
૩. માઇક્રોવાર્પ માપન
- અવકાશી આવર્તન વિશ્લેષણ:
- ઉચ્ચ-રીઝોલ્યુશન સપાટી ટોપોગ્રાફી મેળવો.
- 2D FFT દ્વારા પાવર સ્પેક્ટ્રલ ડેન્સિટી (PSD) ની ગણતરી કરો.
- નિર્ણાયક તરંગલંબાઇને અલગ કરવા માટે બેન્ડપાસ ફિલ્ટર્સ (દા.ત., 0.5-20 મીમી) લાગુ કરો.
- ફિલ્ટર કરેલા ડેટામાંથી RMS અથવા PV મૂલ્યોની ગણતરી કરો.
- વેક્યુમ ચક સિમ્યુલેશન:લિથોગ્રાફી દરમિયાન વાસ્તવિક દુનિયાના ક્લેમ્પિંગ પ્રભાવોની નકલ કરો.
ડેટા પ્રોસેસિંગ અને ભૂલ સ્ત્રોતો
વર્કફ્લોની પ્રક્રિયા કરી રહ્યા છીએ
- ટીટીવી:આગળ/પાછળની સપાટીના કોઓર્ડિનેટ્સ સંરેખિત કરો, જાડાઈના તફાવતની ગણતરી કરો અને વ્યવસ્થિત ભૂલો (દા.ત., થર્મલ ડ્રિફ્ટ) બાદ કરો.
- નાધનુષ્ય/વાર્પ:ઊંચાઈના ડેટા સાથે LSQ પ્લેન ફિટ કરો; બો = કેન્દ્ર બિંદુ શેષ, વાર્પ = ટોચથી ખીણ સુધીનો શેષ.
- નામાઇક્રોવાર્પ:અવકાશી ફ્રીક્વન્સીઝ, ગણતરી આંકડા (RMS/PV) ફિલ્ટર કરો.
મુખ્ય ભૂલ સ્ત્રોતો
- પર્યાવરણીય પરિબળો:કંપન (ઇન્ટરફેરોમેટ્રી માટે મહત્વપૂર્ણ), હવાનું તોફાન, થર્મલ ડ્રિફ્ટ.
- સેન્સર મર્યાદાઓ:તબક્કાનો અવાજ (ઇન્ટરફેરોમેટ્રી), તરંગલંબાઇ માપાંકન ભૂલો (કોન્ફોકલ), સામગ્રી-આધારિત પ્રતિભાવો (કેપેસિટીન્સ).
- વેફર હેન્ડલિંગ:ધાર બાકાત ખોટી ગોઠવણી, ટાંકામાં ગતિ તબક્કાની અચોક્કસતા.

પ્રક્રિયાની જટિલતા પર અસર
- લિથોગ્રાફી:સ્થાનિક માઇક્રોવાર્પ DOF ઘટાડે છે, જેના કારણે CD ભિન્નતા અને ઓવરલે ભૂલો થાય છે.
- સીએમપી:પ્રારંભિક TTV અસંતુલન બિન-સમાન પોલિશિંગ દબાણ તરફ દોરી જાય છે.
- તણાવ વિશ્લેષણ:ધનુષ્ય/વાર્પ ઉત્ક્રાંતિ થર્મલ/યાંત્રિક તાણ વર્તન દર્શાવે છે.
- પેકેજિંગ:વધુ પડતું TTV બોન્ડિંગ ઇન્ટરફેસમાં ખાલી જગ્યાઓ બનાવે છે.
XKH નું સેફાયર વેફર
પોસ્ટ સમય: સપ્ટેમ્બર-28-2025